

OpenSwarm Course on DotBots at La Réunion
OpenSwarm course on DotBots at La Réunion Members of the OpenSwarm consortium delivered a 2-day course last December teaching how to use the DotBot, the

725 DotBots connected in the project’s testbed
Historic Milestone: 725 DotBots Integrated into Project Testbed A landmark achievement We are thrilled to announce that partners from Work Package 5 “Implementation and Verification
IEEE ICRA 2026 Paper
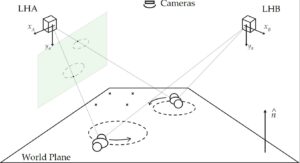
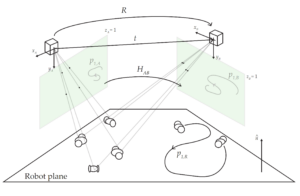
Automatic Lighthouse Calibration Using Conics for Indoor Robot Localization. Said Alvarado-Marin, Alexander Abadie, Martina Balbi, Thomas Watteyne, Filip Maksimovic. IEEE International Conference on Robotics & Automation (ICRA), conference version of the RAL article, Vienna, Austria, 1-5 June 2026.
IEEE Computing, Communications and IoT Applications Conference (ComComAp) paper
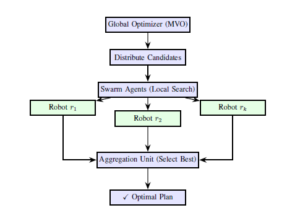
Hybrid Multiverse-based Parallel Computing Framework for Task Scheduling in Swarm Robotics, Mohmmadsadegh Mokhtari, David Scalais, Jeroen Famaey, presented at the IEEE Computing, Communications and IoT Applications Conference

Best Paper Award Finalist at IEEE MRS 2025
The paper “Design for One, Deploy for Many: Navigating Tree Mazes with Multiple Agents” was selected as a Best Paper Award Finalist at the 5th

Robotics and Autonomous Systems article
Energy harvesting aware path planning for ambiently-powered multi-robot systems, Mohmmadsadegh Mokhtari, Bram Vanderborght, Jeroen Famaey,Robotics and Autonomous Systems,Volume 197, 2026, https://www.sciencedirect.com/science/article/pii/S0921889025003574 Abstract: Autonomous multi-robot systems are

Swarm Workshop 2025
OpenSwarm co-organised the Swarm Workshop on 26-27 November 2025 The Swarm Workshop is a 2-days event taking place in Brussels on 26-27 November 2025. Co-organised
IEEE Access 2025 Article
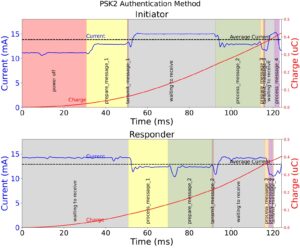
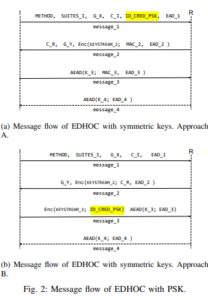
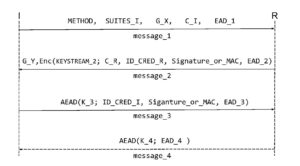
Pre-Shared Key Authentication with EDHOC: The Security-Performance Tradeoff. Elsa Lopez Perez, Thomas Watteyne, Rafael Marin-Lopez, Cristina Onete, Mališa Vučinić. IEEE Access, to appear in 2025.
npj Robotics 2025 Article
GenSwarm: Scalable Multi-Robot Code-Policy Generation and Deployment via Language mModels. Wenkang Ji, Huaben Chen, Mingyang Chen, Guobin Zhu, Lufeng Xu, Roderich Gross, Rui Zhou, Ming Cao, Shiyu Zhao. npj Robotics, to appear in 2025.
IFIP PEMWN Paper
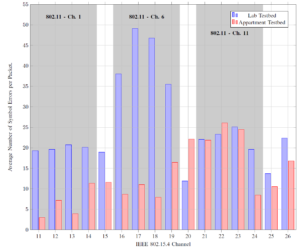
Experimental Investigation of Bit Errors in Coexisting BLE and IEEE 802.15.4 Channels. Diego Badillo-San-Juan, Alfonso Cortés, Said Alvarado-Marin, Alexandre Abadie, Fabian Graf, Thomas Watteyne, Filip Maksimovic. IFIP International Conference on Performance Evaluation and Modeling in Wired and Wireless Networks (PEMWN), Paris, France, 25-27 November 2025
IEEE MRS Paper
Design for One, Deploy for Many: Navigating Tree Mazes with Multiple Agents. Jahir Argote-Gerald, Genki Miyauchi, Julian Rau, Paul Trodden, Roderich Groß. IEEE International Symposium on Multi-Robot & Multi-Agent Systems (MRS), Singapore, 4-5 December 2025,

ANTS 2024 Best Poster Award!
“A Comparative Study of Energy Replenishment Strategies for Robot Swarms”, poster presented by Genki Miyauchi, at the ANTS 2024 conference.

IEEE Communications Magazine 2025 Article
What to Expect when Using DECT NR+. Fabian Graf, Thomas Watteyne, Michael Villnow. IEEE Communications Magazine, to appear in 2025.

IEEE Transactions on Network and Service Management 2025 Article
Management of 6TiSCH Networks Using CORECONF: A Clustering Use Case. Fabian Graf, David Pauli, Michael Villnow, Thomas Watteyne. IEEE Transactions on Network and Service Management (TNSM), 30 October 2025.

OpenSwarm Roadshow at Latinoware 2025
OpenSwarm at Latinoware, Brazil Foz do Iguaçu, Brazil: Inria researcher Geovane Fedrecheski presented the DotBots and the OpenSwarm Testbed at Latinoware, the 22nd Latin American
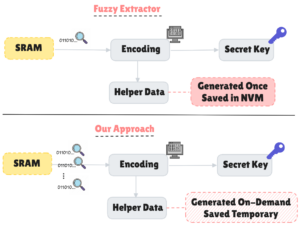
IEEE ISC 2025 Paper
ODHD: On-Demand Helper Data Generation for Reliable NVM-Free Key Derivation from SRAM PUF. Sara Faour, Malisa Vucinic, Filip Maksimovic, Thomas Watteyne, Kristofer Pister. IEEE International Conference on Information Security And Cryptology (ISC), Ankara, Türkiye, 22–23 October 2025.

OpenSwarm Roadshow at UTFPR 2025
OpenSwarm at Federal Technological University, Paraná, Brazil Inria researcher Geovane Fedrecheski presented the DotBot and the OpenSwarm Testbed at Federal Technological University, Paraná, in Brazil.
Machine Learning Article 2025
Temporal Distillation: Compressing a Policy in Space and Time. Thomas Avé, Matthias Hutsebaut-Buysse, Kevin Mets. Machine Learning, vo. 114, 15 October 2025.

OpenSwarm Roadshow at Salvador Arena Foundation 2025
OpenSwarm at Salvador Arena Foundation We delivered a talk about the DotBot and the OpenSwarm testbed to the Salvador Arena Foundation, a non-profit college for

OpenSwarm Roadshow at USP 2025
OpenSwarm at University of São Paulo, Brazil Inria researcher Geovane Fedrecheski presented the DotBot and the OpenSwarm Testbed at University of São Paulo (USP), in

OpenSwarm Roadshow at JNRR 2025
OpenSwarm at JNRR 2025 in Rennes, France Inria researchers Alexandre Abadie and Geovane Fedrecheski presented the DotBot and the OpenSwarm Testbed tools to the French
Best demo award at EWSN 2025!
The Inria team received the Best Demo Award at the International Conference on Embedded Wireless Systems and Networks (EWSN) 2025 in Leuven, Belgium for the
CrystalFreeIoT 2025 Paper
An Open-Source Multi-Platform SDK for Programming SCuM. Alexandre Abadie, Titan Yuan, Thomas Watteyne, Filip Maksimovic. Workshop on Crystal-Free/-Less Radio and System-based Research for IoT (CrystalFreeIoT), International Conference on Embedded Wireless Systems and Networks (EWSN), Leuven, Belgium, 22 September 2025.
CrystalFreeIoT 2025 Paper
A RIOT Port for the Single-Chip Mote. Alexandre Abadie, Koen Zandberg, Thomas Watteyne, Filip Maksimovic. Workshop on Crystal-Free/-Less Radio and System-based Research for IoT (CrystalFreeIoT), International Conference on Embedded Wireless Systems and Networks (EWSN), Leuven, Belgium, 22 September 2025.
EWSN 2025 Demo (graf25zephyr)
Demo: Zephyr and SmartMesh IP: Happy Together. Fabian Graf, Michael Villnow, Thomas Watteyne. International Conference on Embedded Wireless Systems and Networks (EWSN), Poster and Demo Session, Leuven, Belgium, 22 September 2025.
CrystalFreeIoT 2025 Paper (liu24sccanopy)
SC-Canopy: A Tiered Network Architecture for Indoor Robot Swarms. Mengyao Liu, Luiz Sampaio, Jonathan Oostvogels, Kate O’Riordan, Sam Michiels, Thomas Watteyne, Danny Hughes. Workshop on Crystal-Free/-Less Radio and System-based Research for IoT (CrystalFreeIoT), International Conference on Embedded Wireless Systems and Networks (EWSN), Leuven, Belgium, 22 September 2025.
EWSN 2025 Demo (alvarado25multi)
Demo: Multi-sensor Lighthouse v2 Decoding Optimized for Low-Power CPU. Said Alvarado-Marin, Arnaud Taffanel, Marcus Eliasson, Filip Maksimovic, Thomas Watteyne. International Conference on Embedded Wireless Systems and Networks (EWSN), Poster and Demo Session, Leuven, Belgium, 22 September 2025.
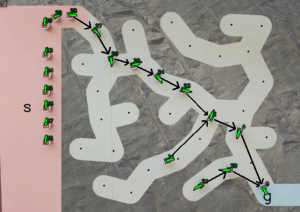
EWSN 2025 Demo (fedrecheski25mari)
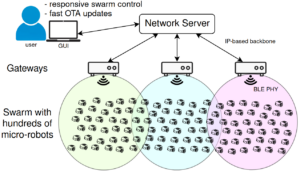
Demo: Mari Allows Connecting Large Scale Robot Swarms using TSCH over BLE and Multiple Independent Gateways. Geovane Fedrecheski, Alexandre Abadie, Mališa Vučinić, Said Alvarado-Marin, Thomas Watteyne. International Conference on Embedded Wireless Systems and Networks (EWSN), Poster and Demo Session, Leuven, Belgium, 22 September 2025.
CrystalFreeIoT 2025 Paper (faour25two)
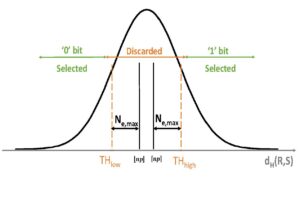
Two-Stage Threshold-based Majority Voting Scheme (TMVS) for Robust SRAM PUFs. Sara Faour, Malisa Vucinic, Thomas Watteyne, Kristofer Pister. Workshop on Crystal-Free/-Less Radio and System-based Research for IoT (CrystalFreeIoT), International Conference on Embedded Wireless Systems and Networks (EWSN), Leuven, Belgium, 22 September 2025.

EWSN 2025 Demo (elkilani25vega)
Demo: Vega – turning a Toy into a Ready-to-Use Robotic Platform. Narmin Elkilani, Baptiste Carbillet, Jean-Paul Fabre, Thomas Watteyne. International Conference on Embedded Wireless Systems and Networks (EWSN), Poster and Demo Session, Leuven, Belgium, 22 September 2025.

Presentation at IEEE CSCN!
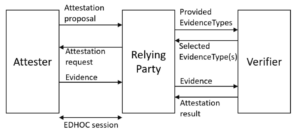
On 16-Sep-2026, Yuxuan SONG (INRIA) presented the paper “When to Attest? Intra- and Post-Handshake Attestation for IoT Swarms. she wrote together with Muhammad Usama Sardar,
IEEE CSCN 2025 Paper (song25attest)
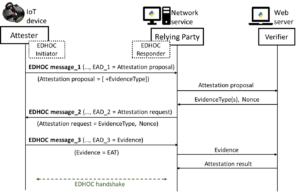
When to Attest? Intra- and Post-Handshake Attestation for IoT Swarms. Yuxuan Song, Muhammad Usama Sardar, Geovane Fedrecheski, Mališa Vučinić, Thomas Watteyne. IEEE Conference on Standards for Communications and Networking (CSCN). Bologna, Italy. 15–17 September 2025.

KU Leuven/Inria get the DotBot v3 running!
KU Leuven hosted researcher Geovane Fedrecheski (Inria) for the delivery of new DotBots, followed by collaborative testing and demonstrations of the latest DotBot developments. The

Successful PoC3 Tests on the Etang de Thau!
The OpenSwarm project develops an automated system that monitors and counts motorboats in a protected marine area (PMAs), and tracks their speed to help manage

IETF 123
As part of the standardization efforts of the OpenSwarm consortium, Inria researchers Elsa Lopez Perez, Geovane Fedrecheski, Malisa Vucinic, and Yuxuan Song attended the IETF-123 meeting in Madrid, Spain. The meeting included an intense and fun weekend hackathon, presentations on IETF draft updates, and several side meetings.
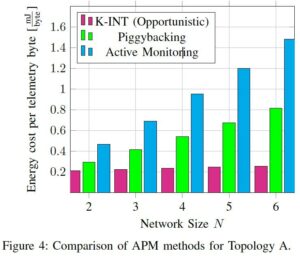
IEEE ISCC 2025 Paper (graf25hypm)
Fabian Graf, Esteban Norena Arroyave, Thomas Watteyne, Michael Villnow, HyPM: Hybrid Performance Monitoring for Low-Power Wireless Networks, IEEE Symposium on Computers and Communications (ISCC), Bologna, Italy, 2-5 July 2025.
IEEE 2025 ISCC Paper (song25aura)
Yuxuan Song, Geovane Fedrecheski, Mališa Vučinić, Thomas Watteyne, AuRA: Remote Attestation over EDHOC for Constrained Internet-of-Things Use Cases, IEEE Symposium on Computers and Communications (ISCC), Bologna, Italy, 2-5 July 2025.
IEEE Robotics and Automation Letters Article 2025 (obilikpa25scalable)
Stanley C. Obilikpa, Mohamed S. Talamali, Genki Miyauchi, John Oyekan, Roderich Groß, Scalable Plug-and-Play Robotic Fabrics Based on Kilobot Modules, IEEE Robotics and Automation Letters, vol. 10, pages 6832-6839.
IEEE Robotics and Automation Letters Article (alvarado25automatic)
Said Alvarado-Marin, Alexander Abadie, Martina Balbi, Thomas Watteyne, Filip Maksimovic, Automatic Lighthouse Calibration Using Conics for Indoor Robot Localization, IEEE Robotics and Automation Letters.

Automatica Trade Fair
Automatica 2025, one of the world’s premier trade fairs for intelligent automation and robotics, features Ingeniarius and other OpenSwarm partners.. June 24-27, Munich.

Said Alvarado Marin’s PhD thesis defense
Title: “Communication-Aware Coordination of Multi-Robot Systems”
Date of defense: 06-June-2025

Press Release
The Least Confident Delivery Drone Gets the Job – press release by the Technical University of Darmstadt
EuCNC 2024 Paper (liu24low)
Low-latency Symbol-Synchronous Communication for Multi-hop Sensor Networks. Xinlei Liu, Andrey Belogaev, Jonathan Oostvogels, Bingwu Fang, Danny Hughes, Maarten Weyn. European Conference on Networks and Communications (EuCNC), Antwerp, Belgium, 3-6 June 2024.
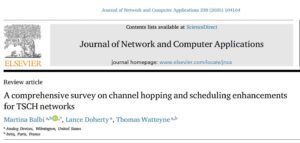
Journal of Network and Computer Applications Article 2024 (balbi25comprehensive)
Martina Balbi, Lance Doherty, Thomas Watteyne, A comprehensive survey on channel hopping and scheduling enhancements for TSCH networks, Journal of Network and Computer Applications, vol. 238, June 2025, 104164, doi: https://doi.org/10.1016/j.jnca.2025.104164.

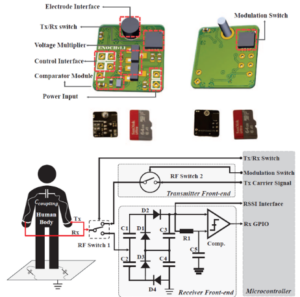
CapBot presented at ICRA 2025
Mengyao Liu (KUL) presented CapBot at ICRA 2025 — a battery-free swarm robotics platform featuring fast charging and mobile energy sharing.

DotBot Demo at the Olympiades des Sciences de l’Ingénieur!
On May 14, Yuxuan Song and Geovane Fedrecheski presented a live demo of the DotBot platform at the amphitheatre of Inria Paris, showcasing OpenSwarm’s real-time swarm robotics. […]
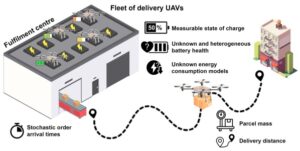
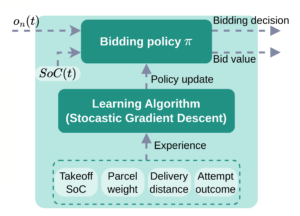
IEEE AAMAS 2025 Paper (talamali25ready)
Mohamed S. Talamali, Genki Miyauchi, Thomas Watteyne, Micael S. Couceiro, Roderich Gross, Ready, Bid, Go! On-Demand Delivery Using Fleets of Drones with Unknown, Heterogeneous Energy Storage Constraints, 24th International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2025), Detroit, Michigan, USA, 19–23 May 2025.
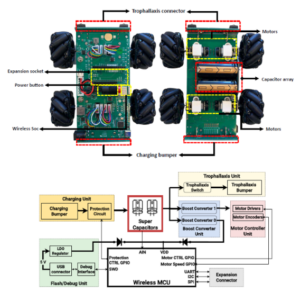
ICRA 2025 Paper (liu25capbot)
Mengyao Liu, Lowie Deferme, Tom Van Eyck, Sam Michiels, Alexandre Abadie, Said Alvarado-Marin, Filip Maksimovic, Genki Miyauchi, Jessica Jayakumar, Mohamed S. Talamali, Thomas Watteyne, Roderich Gross, Danny Hughes, CapBot: Enabling Battery-Free Swarm Robotics, accepted at ICRA’25, Atlanta, Georgia, USA, May 19-23, 2025.
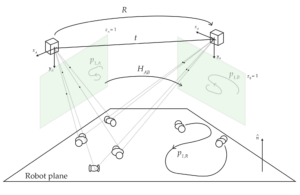
ICRA 2025 Paper (alvaradomarin25lighthouse)
Said Alvarado-Marin, Cristobal Huidobro-Marin, Martina Balbi, Trifun Savic, Thomas Watteyne, Filip Maksimovic. Ligthhouse Localization of Miniature Wireless Robots. IEEE International Conference on Robotics & Automation (ICRA), conference version of the RAL article, Atlanta USA, 19–23 May, 2025.

OpenSwarm hackathon at Inria Paris!
On May 15, an OpenSwarm hackathon was held at Inria Paris focusing on the DotBot testbed. Check out the video about the event !
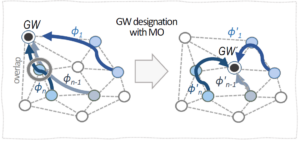
IEEE RTAS 2025 Paper (gutierrezgaitan25minimal)
Miguel Gutiérrez Gaitán, Luís Almeida, Pedro M. d’Orey, Pedro M. Santos, Thomas Watteyne, Journal-First: Minimal-Overlap Centrality for Multi-Gateway Designation in Real-Time TSCH Networks, IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS), Irvine, CA, USA, 6-9 May 2025.

OpenSwarm paper is a finalist for the Best Paper Award at AAMAS!
May 19–23, 2025, AAMAS 2025 is taking place in Detroit where a paper from OpenSwarm is short-listed as a Best Paper Award finalist!

Managing underwater noise pollution: Experiments with Smart Buoys!
The OpenSwarm project develops an automated system that monitors and counts boats in a protected marine area (PMA), and tracks their speed to help manage underwater noise pollution. […] We are conducting a comprehensive series of experiments in the Etang de Thau in the South of France. We use buoys equipped with hydrophones. […]
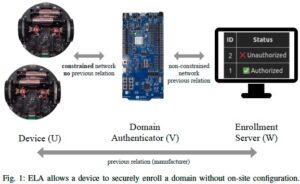
IEEE DCOSS-IoT 2025 Paper (fedrecheski25ela)
Geovane Fedrecheski, Göran Selander, Thomas Watteyne, Mališa Vučinić, ELA: Secure, Lightweight, and Zero-Touch Enrollment for IoT Devices, International Conference on Distributed Computing in Smart Systems and the Internet of Things (IEEE DCOSS-IoT), Lucca, Italy, 9-11 June 2025.

Visit and talk at HKUST-GZ
Researcher Geovane Fedrecheski (Inria) visited the Hong Kong University of Science and Technology, campus of Guangzhou. He presented blink, the networking solution being developed for the connection of the OpenSwarm 1,000 DotBots testbed. The opportunity expanded the reach of the technology developed by the OpenSwarm consortium, and was fruitful to cross-pollinate ideas, making sure we continue tuned with related global teams working on similar problem spaces.

2nd International Workshop on MetaOS for the Cloud-Edge-IoT Continuum!
OpenSwarm engineer Luiz Sampaio was in Rotterdam, Netherlands, to participate in the 2nd International Workshop on MetaOS for the Cloud-Edge-IoT Continuum (MECC 2025 https://meccworkshop.github.io/).
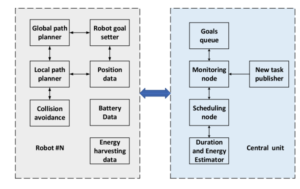
Elsevier Robotics and Autonomous Systems Journal Article 2025 (mokhtari25energy)
Energy-Aware Multi-Robot Scheduling using Heuristic Optimization methods for Ambiently-Powered Robot Swarms. Mohmmadsadegh Mokhtari, Parham Haji Ali Mohammadi, Michiel Aernouts, Ritesh Kumar Singh, Bram Vanderborght, Maarten Weyn, Jeroen Famaey. Robotics and Autonomous Systems Journal, vol. 186, April 2025

German Robotics Conference
OpenSwarm researchers Genki Miyauchi (University of Sheffield) and Roderich Groß (University of Sheffield/TU Darmstadt) were in Nuremburg, Germany, to participate in the 1st German Robotics Conference (GRC) organized by the Robotics Institute Germany (RIG).
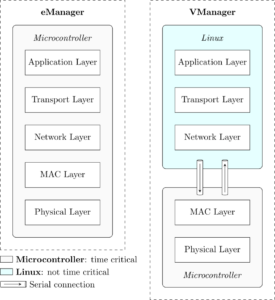
ACM MECC 2025 Paper (sampaio25porting)
Luiz Sampaio, Kate O’Riordan, Dara O’Sullivan, Brian Coffey, Thomas Watteyne, Porting A Real-Time Operating System for Embedded IoT Devices to Linux as Part of the OpenSwarm Project. 2nd International Workshop on MetaOS for the Cloud-Edge-IoT Continuum (MECC 2025), Rotterdam, NL, 31st March 2025.
IETF 122
OpenSwarm researchers, Geovane Fedrecheski, Yuxuan Song and Elsa Lopez were in Bangkok, Thailand to participate in IETF 122, one of the three annual events organized by the Internet Engineering Task Force. The IETF is the standardization organization behind today’s Internet.
IEEE PerCom 2025 Paper (liu25enoch)
Mengyao Liu, Jonathan Oostvogels, Bingwu Fang, Sam Michiels, Haoxiang Ma, Yang Yang, Danny Hughes, ENOCH: ENabling On-body network Contention Handling, accepted at the 23rd International Conference on Pervasive Computing and Communications (PerCom 2025), Washington DC, USA, March 17 – 21, 2025.

GRC 2025 Paper (miyauchi25human)
Genki Miyauchi, Mohamed S. Talamali, Alan Millard, Yuri Kaszubowski Lopes, Roderich Gross
Multi-Human Multi-Robot Interaction: Cooperation Leveraging a Robot Swarm as a Shared Resource, German Robotics Conference (GRC), Nuremberg, Germany, March 13-15, 2025.

GRC 2025 Paper (miyauchi25energy)
Genki Miyauchi, Mohamed S. Talamali, Mengyao Liu, Lowie Deferme, Tom Van Eyck, Sam Michiels, Jessica Jayakumar, Alexandre Abadie, Geovane Fedrecheski, Martina Balbi, Said Alvarado-Marin, Felix Matzdorf, Julian Rau, Danny Hughes, Thomas Watteyne, Roderich Gross, Energy Replenishment Strategies for Robot Swarms, German Robotics Conference (GRC), Nuremberg, Germany, March 13-15, 2025.
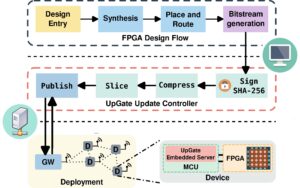
IEEE ICIN 2025 Paper (abadie25upgate)
UpGate: Low-Power and Secure Over-the-Air Hardware Reconfiguration for Deployed FPGAs. Alexandre Abadie, Alfonso Cortes, Thomas Watteyne, Filip Maksimovic. IEEE Conference on Innovation in Clouds, Internet and Networks (ICIN), Paris, France, 11-14 March 2025.

FOSDEM talk
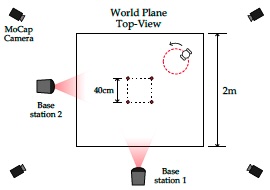
Said Alvarado-Marin, Repurposing Valve’s SteamVR 2.0 Technology to Develop an Open-Source, Low-Cost Motion Capture System for Robotics, Brussels, Belgium, February 1-2 2025.

Battery-free robot tutorial
Check out the video of Prof. Danny Hughes (KU Leuven) giving a tutorial on battery-free robots at the Hands-on AI and Mobile Systems Winterschool in Como, Italy.
CapBot Video
This video shows the CapBot platform as submitted to the ICRA 2025 technical paper track and used in the associated ICRA 2025 tutorial submission.
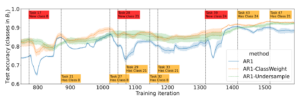
ESANN 2025 Paper (wei25reducing)
Wei Wei, Matthias Hutsebaut-Buysse, Tom De Schepper, Kevin Mets, Reducing the stability gap for continual learning at the edge with class balancing, ESANN25, Bruges, Belgium, April 23-25, 2025.

IEEE Access Article 2025 (balbi25embedded)
Martina Balbi, Lance Doherty, Thomas Watteyne, Embedded Artificial Intelligence for IoT Applications Using the MAX78000, IEEE Access, vol. 13, pp. 38979-39005, 2025, doi: 10.1109/ACCESS.2025.3546557.

Autonomous Navigation and Charging!
Last week, a meet-up was organised between the teams of Prof. Danny Hughes (KU Leuven) and Prof Roderich Gross (U of Sheffield/Darmstadt) as part of the OpenSwarm project. Together, they worked on connecting the DotBot to its virtual machine and zone-based localisation system. Check out the video showcasing the successful autonomous navigation to the drive-in charging dock!

MDPI Drones Article 2025 (araujo25multi)
A Multi-Drone System Proof of Concept for Forestry Applications. André G. Araujo, Carlos A. P. Pizzino, Micael S. Couceiro, Rui P. Rocha. MRPI Drones 2025, 9(2), 80, published: 21 January 2025.
Demo “Remote Attestation over EDHOC”
Watch the video by Yuxuan Song, Mališa Vučinić: on Remote Attestation over EDHOC.
ANTS 2024 Paper (talamali24ondemand)
On-Demand Delivery Using Fleets of UAVs with Unknown, Heterogeneous Energy Storage. Mohamed S. Talamali, Genki Miyauchi, Thomas Watteyne, Roderich Gross. Late-breaking result abstract at ANTS 2024, the 14th International Conference on Swarm Intelligence, October 9-11, 2024. Konstanz, Germany
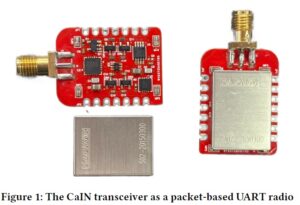
ACM EWSN 2024 Paper (liu24cain)
CaIN: Low Power and Low Latency VHF Mesh Networking, Mengyao Liu, Bingwu Fang, Jonathan Oostvogels, Sam Michiels, Andrei Belogaev, Xinlei Liu, Jeroen Famaey, EWSN 2024, 10-13 December 2024 Abu Dhabi, United Arab Emirates.

SwarmIT demo
This demo presents SwarmIT, a software designed to turn a collection of DotBots into a swarm testbed.
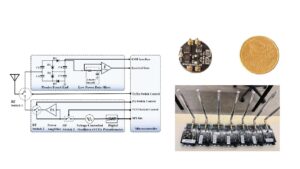
IEEE HONET 2024 paper (mokhtari24lowpower)
Low-power Energy Management Module for Ambiently Powered Robotic Swarms. Mohmmadsadegh Mokhtari, Parham Haji Ali Mohamadi, Dragan Subotic, Ritesh Kumar Singh, Bram Vanderborght, Maarten Weyn, Jeroen Famaey, IEEE HONET 2024, 3-5 December 2024 Doha, Qatar.

IEEE HONET 2024 Best Paper Award!
Best Paper Award, Mohmmadsadegh Mokhtari, Parham Haji Ali Mohamadi, Dragan Subotic, Ritesh Kumar Singh,
Bram Vanderborght, Maarten Weyn, Jeroen Famaey, Track: Robotics, Paper entitled: Low-power Energy Management Module for Ambiently Powered Robotic Swarms, IEEE HONET 2024, 3-5 December 2024, Doha, Qatar

IEEE SmartIoT 2024 Best Paper Award!
Best Paper Award presented to Fabian Graf, Thomas Watteyne, Filip Maksimovic, Michael Villnow for the paper titled Channel-Dependant Forward Error Correction for IEEE 802.15.4 O-QPSK
The 8th IEEE International Conference on Smart Internet of Things, November 14-16, 2024 Shenzhen, China
IEEE SmartIoT 2024 paper (graf24channel)
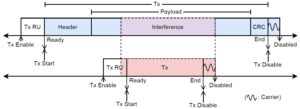
Channel-Dependent Forward Error Correction for IEEE 802.15.4 O-QPSK. Fabian Graf, Thomas Watteyne, Filip Maksimovic, Michael Villnow. IEEE International Conference on Smart Internet of Things (SmartIoT) 14-16, November 2024, Shenzhen, China.

IEEE IECON 2024 paper (sampaio24running)
Running SmartMesh on the MAX32655 with MicroPython. Luiz Sampaio, Kate O’Riordan, Dara O’Sullivan, Brian Coffey, Lance Doherty, Thomas Watteyne. Conference of the IEEE Industrial Electronics Society (IECON), Chicago, IL, USA, 3-6 November 2024.

Interview with José Quevedo
A new episod in the series of short interviews with the scientific lead of each consortium member. Find out more about who they are, what is their role in the project and what is their vision for the use of the technology developed in the OpenSwarm project.
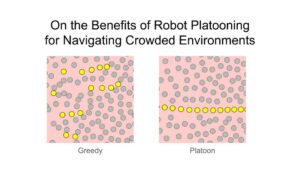
DARS 2024 paper (argotegerald24benefits)
On the Benefits of Robot Platooning for Navigating Crowded Environments. Jahir Argote-Gerald, Genki Miyauchi, Paul Trodden, Roderich Gross, DARS2024, 28-30 October 2024, NYC, USA.

DAFUSAI 2024 paper (wei24feature)
Feature-level fusion in wireless acoustic sensor networks with graph attention networks for classification of domestic activities
Wei Wei, Matthias Hutsebaut-Buysse, Thomas Avé, Tom De Schepper, Kevin Mets. 2nd Workshop on Data Fusion for Artificial Intelligence (DAFUSAI)
October 19th, 2024 at ECAI, Santiago de Compostela.
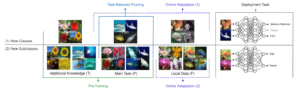
ESANN 2024 paper (ave24online)
Online Adaptation of Compressed Models by Pre-Training and Task-Relevant Pruning. Thomas Avé, Matthias Hutsebaut-Buysse, Wei Wei, Kevin Mets, The 32th European Symposium on Artificial Neural Networks, Computational Intelligence and Machine Learning (ESANN), Bruges, Belgium, 9-11 October 2024
ANTS 2024 paper (miyauchi24comparative)
“A Comparative Study of Energy Replenishment Strategies for Robot Swarms”, poster presented by Genki Miyauchi, at the ANTS 2024 conference.
IEEE Robotics and Automation Letters Article 2024 (alvarado24lighthouse)
Lighthouse Localization of Miniature Wireless Robots. IEEE Robotics and Automation Letters. Alvarado-Marin, S., Huidobro-Marin, C., Balbi, M., Savić, T., Watteyne, T., & Maksimovic, F. (2024).

ICT Express Journal Article 2024 (graf24monitoring)
Monitoring Performance Metrics in Low-Power Wireless Systems. Fabian Graf, Thomas Watteyne, Michael Villnow. Elsevier ICT Express.
GDR RSD Day paper (song24enhancing)
Enhancing Security for Constrained IoT Devices with Lightweight Remote Attestation. Yuxuan Song, Mališa Vučinić, Thomas Watteyne. Common Day at GDR RSD, GPL (GT GL_Sec) and SI (GT SSLR) on network stack security, Orléans France, 30 September 2024

TDMA DotBot demo
Enhancing DotBot Network Efficiency: Using TDMA to Increase Gateway Capacity
IEEE IOTSMS 2024 paper (lopezperez24preshared)
Pre-shared key authentication in Ephemeral Diffie-Hellman Over COSE. Elsa Lopez Perez, Thomas Watteyne, Mališa Vučinić. IEEE International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Malmo, Sweden, 2-5 September 2024.
IEEE Computer Article 2024 (lopezperez24edhoc)
EDHOC is a New Security Handshake Standard: Overview of Security Analysis. Elsa Lopez Perez, Göran Selander, John Preuß Mattsson, Thomas Watteyne, Mališa Vučinić. IEEE Computer, to appear in 2024.

Qrkey: Simply and Securely Controlling Swarm Robots
Deploying and interacting with a swarm of robots often requires a lot of infrastructure and access grants to users. In this demo, we are presenting QrKey […]

MDPI Sensors Article 2024 (ave24policy)
Policy Compression for Intelligent Continuous Control on Low-Power Edge Devices. Avé T, De Schepper T, Mets K., Sensors. 2024; 24(15):4876.
Demo presented at IETF 119: zero-touch secure enrollment of DotBots
Demo presented by Geovane Fedrecheski at IETF 119: zero-touch secure enrollment of DotBots

OpenSwarm All-hands meeting in Leuven
Our second All-hands meeting took place in Leuven, Belgium, on 25-26 June 2024.
IEEE ISCC 2024 paper (facq24embedded)
The Embedded Orchestra. Romain Facq, Charles Thonier Trifun Savic, Bertrand Marcon, Thomas Watteyne. IEEE Symposium on Computers and Communications (ISCC), Paris, 26-29 June 2024.
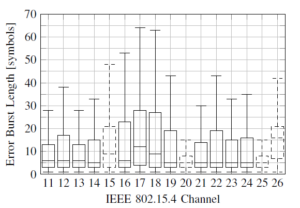
IEEE ISCC 2024 paper (graf24bit)
Bit- and Symbol-Error Patterns of the IEEE 802.15.4 TSCH Mode. Fabian Graf, Thomas Watteyne, Filip Maksimovic, Michael Villnow. IEEE Symposium on Computers and Communications (ISCC), Paris, France, 26-29 June 2024.
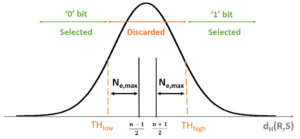
IEEE ISCC 2024 paper (faour24tmvs)
TMVS: Threshold-based Majority Voting Scheme for Robust SRAM PUFs. Sara Faour, Malisa Vucinic, Filip Maksimovic, David C. Burnett, Paul Muhlethaler, Thomas Watteyne, Kristofer Pister. IEEE Symposium on Computers and Communications (ISCC), Paris, 26-29 June 2024.

OpenSwarm workshop on Crystal-Free radio
We are happy to announce that our workshop on Crystal-Free/-Less Radio and System-based Research for IoT, part CPS-IoT week took place on 13-16 May in Hong Kong.
