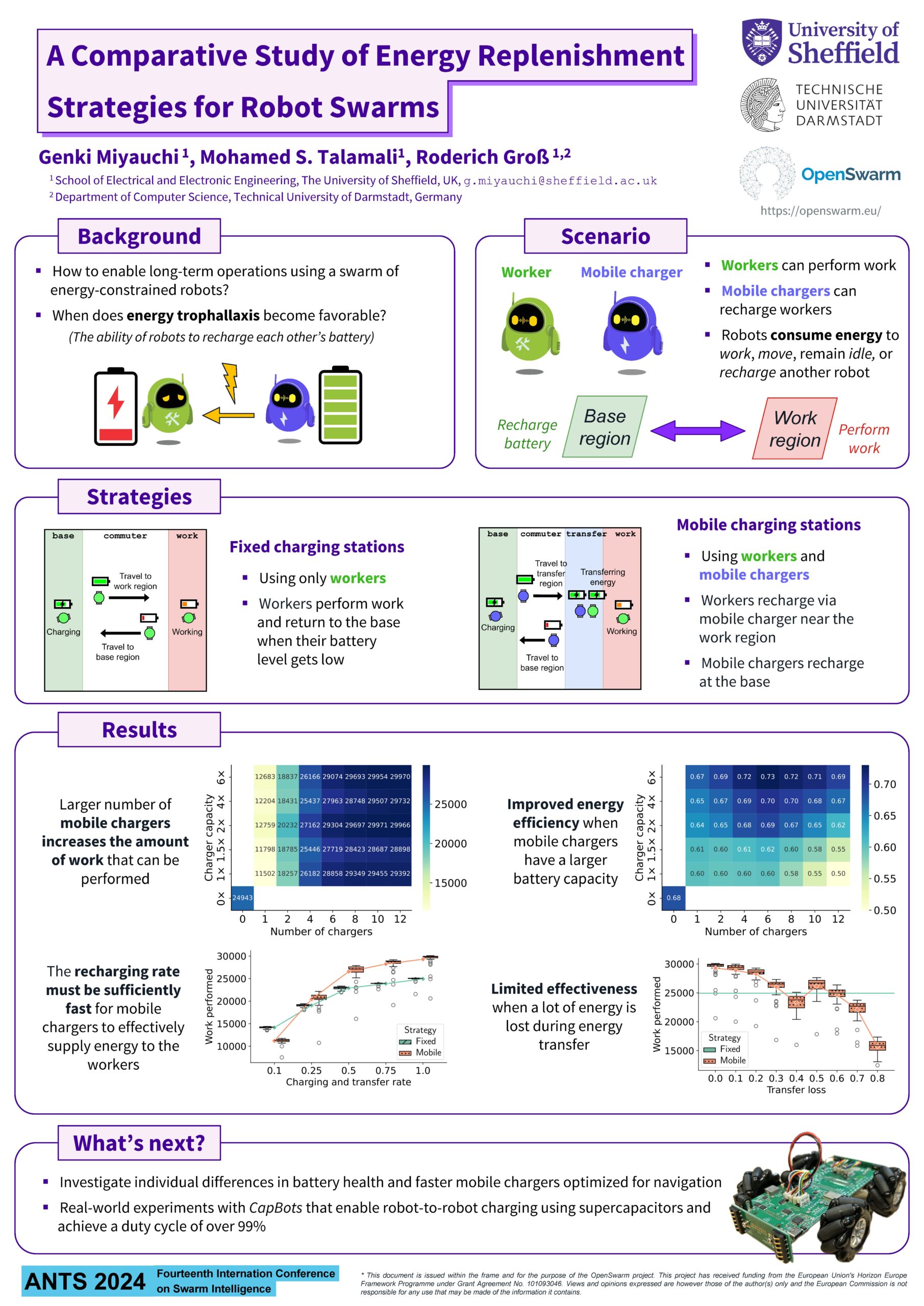
A Comparative Study of Energy Replenishment Strategies for Robot Swarms
Genki Miyauchi, Mohamed S. Talamali, and Roderich Groß, 14th International Conference on Swarm Intelligence (ANTS), Konstanz, Germany, 9-11 October 2024
{kind=link}
{kind=link}
{kind=link}
To enable long-term operations of swarms of energy-constrained robots, they need to manage both their in-flow and out-flow of energy. We consider two strategies for doing so: In the first strategy, all robots work at a remote location but due to their limited storage capacity must return to charge. In the second strategy, dedicated mobile chargers with finite storage capacity deliver energy to the remote location, substantially shortening the worker robots’ commute. We compare the work performed and the energy efficiency of these strategies using physics-based simulations and reveal conditions under which their performance is close to theoretically derived upper bounds. We assess several factors, including the number of mobile chargers, their storage capacity, transfer losses, and the ratio of energy expended while working and traveling. Our findings confirm that mobile chargers can help increase the work performed, and even overall energy efficiency provided that their energy storage is larger than that of workers.
Read the article: https://eprints.whiterose.ac.uk/214864/1/ANTS_2024_paper_1343.pdf