Demo: Mari Allows Connecting Large Scale Robot Swarms using TSCH over BLE and Multiple Independent Gateways. Geovane Fedrecheski, Alexandre Abadie, Mališa Vučinić, Said Alvarado-Marin, Thomas Watteyne. International Conference on Embedded Wireless Systems and Networks (EWSN), Poster and Demo Session, Leuven, Belgium, 22 September 2025.
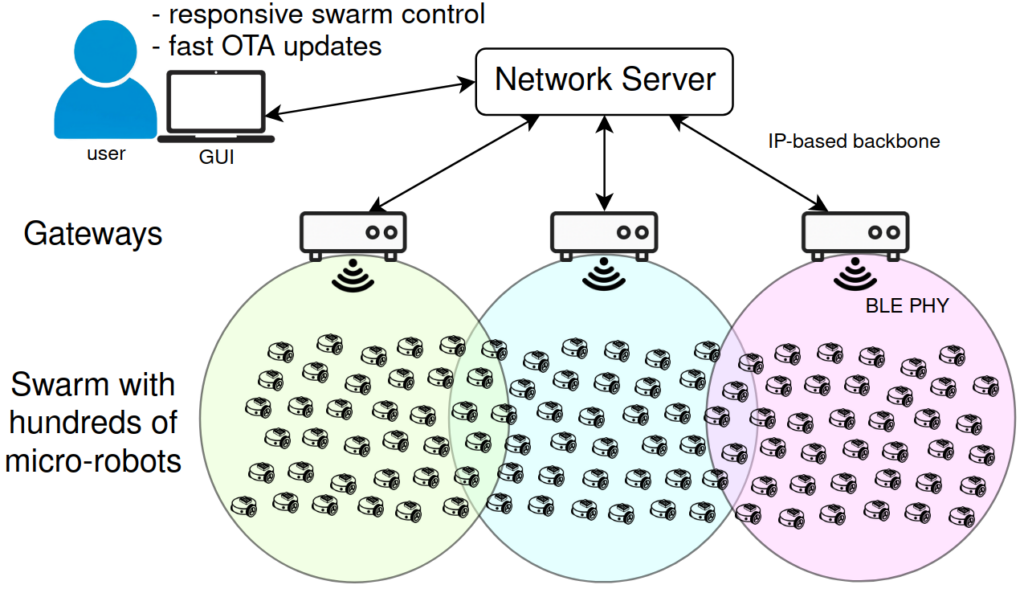
Instrumenting a large-scale micro-robot swarm is challenging due to limitations in existing communication systems. We propose Mari, a TSCH-based link layer over BLE that supports multiple non-coordinated gateways with fast node-controlled handovers. Simulations show a single Mari gateway can handle 100 nodes with latency below 100 ms and best-case node join time under 40 ms. We implement Mari on constrained hardware and find that it uses 33.9 kB of Flash memory and 24.1 kB of RAM. We validate it on a 57-node setup, where full network formation takes 5.8 s. The demo will exhibit a portable network-focused testbed with at least 40 nodes and an user interface showing live network metrics.