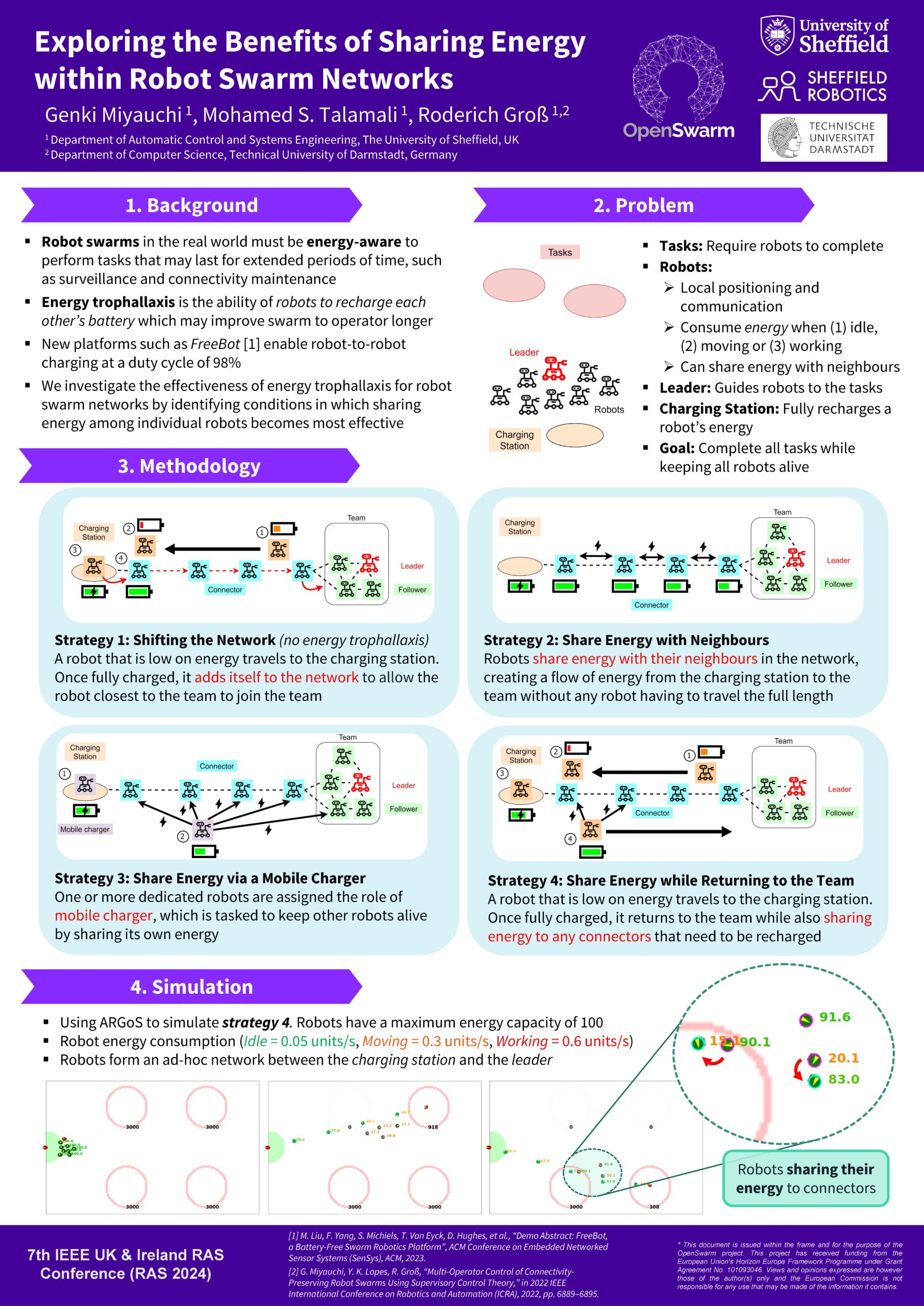
Exploring the Benefits of Sharing Energy within Robot Swarm Networks
Poster by Genki Miyauchi, Mohamed S. Talamali, Roderich Gross presented at the 7th IEEE UK & Ireland RAS Conference (RAS 2024) that took place on the 21st & 22nd February 2024 at the University of Sheffield and Sheffield Hallam University.
Recent swarm robotics research has started focusing on the deployment of swarms for real-world applications. An important aspect that remains to be addressed is the problem of energy management within a swarm. Robot swarms in the real world must be energy-aware to remain operational while also maximising the performance of the task they are executing. This is especially necessary when the task must be performed over extended periods of time, such as surveillance and connectivity maintenance. Due to its distributed nature, one potentially useful behaviour for swarms is “energy trophallaxis”, which is the ability of a robot to donate part of its energy to others. Robot-to-robot charging has been demonstrated by robot platforms such as the Freebot. However, it is not clear how this behaviour can improve the swarm in managing the energy levels of individual robots. In this work, we propose a range of different energy management strategies for robots within a swarm to recharge their energy, some of which employ energy trophallaxis while maintaining a communication network. Using simulated and real robots, we investigate the effectiveness of energy trophallaxis against various energy transfer loss, transfer time, task performance, and its effect on maintaining connectivity. This research highlights the conditions where sharing energy among individual robots in a swarm becomes most effective.